Mando RC y receptor. Programación en Arduino

Índice:
- Conceptos generales sobre drones
- Material necesario y montaje de los componentes hardware
- → Mando RC y receptor. Programación en Arduino
- MPU6050 y su programación en Arduino
- Batería LiPo
- Control de estabilidad y PID
- Motores, ESC y su programación en Arduino
- Calibración de hélices y motores
- Software completo y esquema detallado
- Probando el Software completo antes de volar
- Como leer variables de Arduino en Matlab
Mando radio control (RC)
Una de las maneras más fáciles y baratas de comunicarse con nuestro futuro drone es utilizar un mando RC y un receptor. Son fáciles de utilizar y se pueden conseguir por 30€ en Ebay en sus versiones más básicas (4 canales). Como todo en la electrónica, el mundo de los mandos radio control es muy amplio, pero para nuestro primer drone es suficiente. Dispondremos de un canal para controlar el throttle, otro para el pitch, uno más para el roll y el último para el yaw. He decidido asociar los sticks con las siguientes funciones o movimientos del drone. Recomiendo seguir el mismo criterio ya que es el mas extendido por ser el mas intuitivo a la hora de controlar el drone. Aquí una foto de mi mando:

A pesar de ser algo más caro, este otro mando radio control ofrece unas prestaciones bastante superiores al mencionado arriba, y puede sernos útil el día de mañana si queremos añadir alguna nueva funcionalidad al drone.
El funcionamiento de un mando RC es muy simple. El movimiento de los sticks del mando es procesado y enviado por ondas de radio a nuestro receptor, que irá situado en el frame del drone. Esta información se compone de señales PWM de 50Hz que varían en función de la posición de cada stick. Si accionamos al mínimo alguna de las palanca del mando, el ancho de pulso que recibamos en el receptor será de 1ms, y si la accionamos al máximo, el ancho del pulso será de 2ms (estos valores pueden ser diferentes en cada mando). Si dejamos la palanca en el punto central obtendremos pulsos de 1.5ms aproximadamente, siempre manteniendo una frecuencia de 50Hz. Esta información será enviada a la placa Arduino y se utilizara como referencia para mover el drone.
Como vemos en la imagen anterior, el mando no da exactamente pulsos de 1ms con el stick al mínimo, ni pulsos de exactamente 2ms subiéndolo a máximo. Estos pequeños errores de precisión del mando los corregiremos mas adelante al final de esta entrada.
Conexionado mando-Arduino
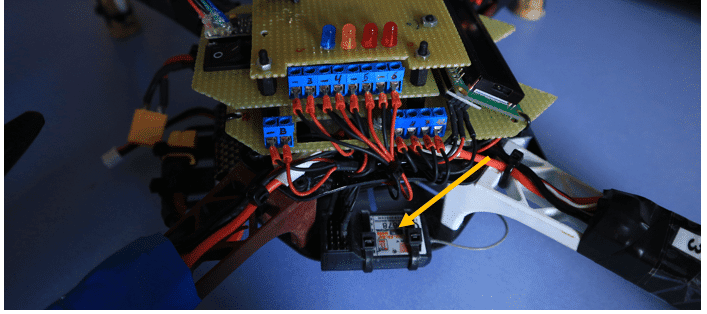
El receptor ira situado en el frame y es necesario alimentarlo y cablearlo de forma adecuada. Alimentaremos el receptor a +5V en cualquiera de los canales centrales, por ejemplo con la tensión de nuestra placa Arduino. Si hemos configurado bien la unión mando-receptor, al encender el mando debería encenderse un led rojo (en mi caso) que indica que funciona correctamente.
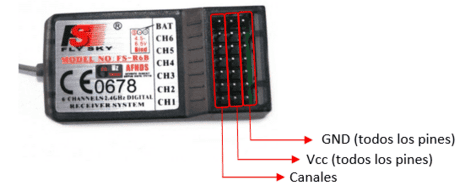
El conexionado necesario para ejecutar el código que os dejo al final de este artículo se muestra a continuación. Simplemente hay que alimentar el receptor en cualquiera de los canales centrales y cablear las cuatro señales a las correspondientes entrada digitales, en mi caso:
 La funcionalidad de cada canal y el pin correspondiente se muestran a continuación:
La funcionalidad de cada canal y el pin correspondiente se muestran a continuación:
- Pitch ⇒ CH2 ⇒ IN 12
- Throttle ⇒ CH3 ⇒ IN 8
- Roll ⇒ CH1 ⇒ IN 9
- Yaw ⇒ CH4 ⇒ IN 7
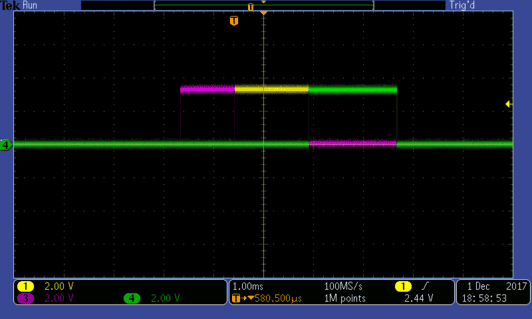
Antes de continuar me gustaría analizar un poco más en detalle el funcionamiento de mi receptor y la forma en la que genera los pulsos. La siguiente imagen muestra una captura sacada con osciloscopio donde visualizo las señales de pitch, roll y yaw (no he metido el canal de throttle por que mi osciloscopio solo tiene 3 canales). De esta imagen he sacado los siguientes datos:
- El receptor genera pulsos de 3.3V.
- Los pulsos se generan de forma secuencial, hasta que no termina un pulso no empieza el siguiente. Nunca habrá más de un canal en estado HIGH cada vez.
Algunos mandos de radiocontrol más avanzados pueden enviar la información de todos los canales utilizando una sola señal (PPM). Tenéis todo lo necesario para leer señales PPM con Arduino en esta entrada.
Código Arduino (Sketch)
Todo el software que utilizaremos a lo largo de esta entrada está subido a GitHub:
La forma más sencilla de leer este tipo de pulsos es utilizar la función PulseIn() de Arduino. Lamentablemente esta función tan fácil de utilizar no sirve para esta aplicación (aunque sí para muchas otras). Pero, ¿Por qué? Como todos a estas alturas sabemos, el código de Arduino se ejecuta de manera secuencial, línea tras línea y de arriba abajo. Arduino no ejecuta una línea si no ha terminado de ejecutar la anterior. Cuando llegue a la línea PulseIn(), Arduino se quedará esperando en ella el tiempo que haga falta hasta recibir un pulso y medirlo. Como sabemos, el mando solo nos enviará un pulso por canal cada 20ms, por lo que esta función PulseIn() estará esperando a recibir el pulso (y sin hacer nada mas) durante 20ms. Teniendo en cuenta que contamos con 4 canales, la demora se puede prolongar hasta 80ms. Este intervalo de tiempo que a priori puede parecer muy corto, para nuestros drone es toda una eternidad y hará que nunca sea estable (esto lo veremos en otro apartado más adelante).
¿Cómo podemos leer las señales recibidas desde el mando de una forma eficiente? Utilizando interrupciones hardware, una por canal. El funcionamiento de una interrupción hardware es muy simple: ante un flanco positivo (cambio de estado de LOW a HIGH) o negativo (cambio de estado de HIGH a LOW) en alguna de las interrupciones (pins), Arduino detendrá la ejecución normal del programa y ejecutara la parte del código que hayamos asociado a esa interrupción en concreto. Una vez ejecutado esta parte de código, Arduino regresará al programa principal y seguirá ejecutándolo donde lo dejó. A continuación os explicaré como leer los canales de vuestro mando RC de forma que la lectura solo lleve unos poco microsegundos (100 veces menos que con la función PulseIn). Para poder poner esto en marcha necesitamos 4 interrupciones hardware, una por cada canal que queremos leer. La paca Arduino Nano cuenta únicamente con dos interrupciones hardware, pero existen librerías como EnableInterrupt.h que permiten convertir casi cualquier pin analógico o digital en interrupción. Esta librería es extremadamente simple de usar como veremos mas adelante.
Al final de este artículo podréis encontrar el sketch completo que utilizo para medir los pulsos con interrupciones hardware. El sketch es muy simple como veréis a continuación. Cuando se detecta un pulso (flanco positivo o negativo) en alguna de las cuatro interrupciones, se ejecuta la parte del código asociado a esa interrupción. El primer paso es identificar si hemos detectado un flanco positivo o uno negativo, para lo que bastará con leer el estado de la propia entrada digital. Si está en estado HIGH significará que hemos detectado un flanco positivo (comienzo del pulso) y si está en LOW, uno negativo (fin del pulso). Cuando se detecta un flanco positivo se registra el tiempo (el instante) en el que se ha dado la interrupción, para lo que utilizaremos la función micros() y lo guardamos en una variable. Una vez hecho esto Arduino sale de la interrupción y sigue ejecutando el código principal. Un tiempo después se detecta un flanco negativo (cambio de estado de HIGH a LOW), por lo que se vuelve a ejecutar la interrupción. Volvemos a leer el estado de la entrada que esta vez estará en estado LOW. Finalmente detenemos el correspondiente contador y calculamos el tiempo que ha transcurrido desde que lo hemos activado, que será el tiempo que ha durado el pulso. A continuación os dejo el código completo para que podáis leer los canales de vuestro mando:

La diferencia de mi sketch con la función PulseIn() es que mi programa no está esperando (y sin hacer nada más) hasta recibir un pulso para seguir ejecutando el loop principal. El programa solo deja de ejecutarse mediante interrupciones para poner en marcha un contador y después detenerlo. Todo el tiempo restante continúa funcionando y ejecutando el control principal. Gracias a esto conseguimos leer los 4 canales del mando RC prácticamente sin consumir nada de tiempo. Os dejo el código completo para que podáis leer los canales de vuestro mando. El conexionado necesario es el mismo que hemos visto mas arriba:
// Declaración de pines
#define pin_INT_Throttle 8 // Pin Throttle del mando RC
#define pin_INT_Yaw 7 // Pin Yaw del mando RC
#define pin_INT_Pitch 12 // Pin Pitch del mando RC
#define pin_INT_Roll 9 // Pin Roll del mando RC
#include <EnableInterrupt.h>
long loop_timer, tiempo_ejecucion;
// INTERRUPCIÓN MANDO RC --> THROTTLE
volatile long Throttle_HIGH_us;
volatile int RC_Throttle_raw;
void INT_Throttle() {
if (digitalRead(pin_INT_Throttle) == HIGH) Throttle_HIGH_us = micros();
if (digitalRead(pin_INT_Throttle) == LOW) RC_Throttle_raw = micros() - Throttle_HIGH_us;
}
// INTERRUPCIÓN MANDO RC --> PITCH
volatile long Pitch_HIGH_us;
volatile int RC_Pitch_raw;
void INT_Pitch() {
if (digitalRead(pin_INT_Pitch) == HIGH) Pitch_HIGH_us = micros();
if (digitalRead(pin_INT_Pitch) == LOW) RC_Pitch_raw = micros() - Pitch_HIGH_us;
}
// INTERRUPCIÓN MANDO RC --> ROLL
volatile long Roll_HIGH_us;
volatile int RC_Roll_raw;
void INT_Roll() {
if (digitalRead(pin_INT_Roll) == HIGH) Roll_HIGH_us = micros();
if (digitalRead(pin_INT_Roll) == LOW) RC_Roll_raw = micros() - Roll_HIGH_us;
}
// INTERRUPCIÓN MANDO RC --> YAW
volatile long Yaw_HIGH_us;
volatile int RC_Yaw_raw;
void INT_Yaw() {
if (digitalRead(pin_INT_Yaw) == HIGH) Yaw_HIGH_us = micros();
if (digitalRead(pin_INT_Yaw) == LOW) RC_Yaw_raw = micros() - Yaw_HIGH_us;
}
void setup() {
// Declaración de interrupciones
pinMode(pin_INT_Yaw, INPUT_PULLUP); // YAW
enableInterrupt(pin_INT_Yaw, INT_Yaw, CHANGE);
pinMode(pin_INT_Throttle, INPUT_PULLUP); // POTENCIA
enableInterrupt(pin_INT_Throttle, INT_Throttle, CHANGE);
pinMode(pin_INT_Pitch, INPUT_PULLUP); // PITCH
enableInterrupt(pin_INT_Pitch, INT_Pitch, CHANGE);
pinMode(pin_INT_Roll, INPUT_PULLUP); // ROLL
enableInterrupt(pin_INT_Roll, INT_Roll, CHANGE);
// Serial.begin()
Serial.begin(115200);
}
void loop() {
// Nuevo ciclo
while (micros() - loop_timer < 10000);
tiempo_ejecucion = (micros() - loop_timer) / 1000;
loop_timer = micros();
// Monitor Serie
Serial.print(RC_Throttle_raw);
Serial.print("\t");
Serial.print(RC_Pitch_raw);
Serial.print("\t");
Serial.print(RC_Roll_raw);
Serial.print("\t");
Serial.println(RC_Yaw_raw);
}Para poder seguir es importante que hayas conseguido poner en marcha esta parte de forma adecuada. Os tenéis que asegurar que cada canal del mando corresponde con los movimientos del drone que hemos asignado. Moved la palanca asociada al Pitch y comprobad que es la variable RC_Pitch_raw la que cambia y haced lo mismo con los demás canales. En caso de no estén bien asignados, podéis modificar el nombre de las variables (recomendado) o modificar el cableado, pero asegurad que moviendo el stick asociado al movimiento Pitch es la variable RC_Pitch_raw la que cambia y no ninguna otra.
Como hemos visto arriba, el receptor no da exactamente pulsos de 1ms con el stick al mínimo, ni pulsos de exactamente 2ms subiéndolo a máximo. Estos pequeños errores de precisión del mando han de ser corregidos, especialmente para el canal destinado al throttle. Para ello utilizaremos el conjunto MandoRC_MaxMin de GitHub, que simplemente lee los cuatro canales y visualiza los valores máximo y mínimos mientras movemos los stick de un lado a otro. Anotaremos la duración de los cuatro pulsos en los extremos de cada canal, moviendo los cuatro stick del mando arriba/abajo e izquierda/derecha hasta conseguir los valores máximos y mínimos de pulso.

Estos valores después serán utilizados para escalar las lecturas del mando a nuestras necesidades para utilizarlos como consigna (referencia) para los controladores PID.
Estos números después se utilizarán para escalar el throttle. Para el Pitch, Roll y Yaw asumo que el mando es ideal y los pulsos varían exactamente entre 1ms y 2ms, ya que son menos críticos. Es importante que en el código que os dejo mas adelante para poner en marcha y controlar los motores modifiquéis los siguientes parámetros en función de lo que haya arrojado el software de arriba:
// AJUSTE MANDO RC - THROTLLE
const int us_max_Throttle_adj = 2000;
const int us_min_Throttle_adj = 950;
const float us_max_Throttle_raw = 2004; // <-- Si teneis la entrada Throttle invertida sustituid este valor
const float us_min_Throttle_raw = 1116; // <-- por este y viceversaAhora que ya sabemos cómo leer pulsos con nuestra placa Arduino, ¿qué hacemos con esta señal? ¿Cómo le decimos a nuestro drone que avance o que gire en una dirección determinada mediante un pulso en microsegundos?
Como ya sabemos, para poder girar o avanzar, el drone tiene que ser capaz de inclinarse manteniéndose estable en el aire. Para ello, tenemos que indicar al drone cuantos grados queremos que se incline en una dirección determinada para poder desplazarse hacia donde se le ha indicado. Por lo tanto, habrá que usar estas señales del mando RC como referencia para inclinar el drone en un eje o en otro. Al fin y al cabo, esa es la función final del mando: indicar al drone cuantos grados queremos que se incline en un eje determinado para poder desplazarnos en una dirección concreta. Para ello, es necesario ‘procesar’ la información en microsegundos que nos llegar del receptor y convertirla a una señal proporcional en grado de inclinación.
Porgamos como ejemplo el stick asociado al eje Pitch. Tenemos que procesar la señal que recibimos del receptor (variable RC_Pitch_raw), de forma que con el stick es su posición central (sin moverlo ni arriba ni abajo), el drone reciba una consigna de 0º de inclinación, es decir, que se mantenga estable y sin inclinarse. Que, si por el contrario, movemos el stick hasta arriba, el drone reciba la orden de inclinarse -30º en ese eje para desplazarse en esa dirección. Y que, si movemos el stick hacia abajo, el drone reciba la orden de inclinarse unos +30º en ese eje para desplazarse en dirección contraria. Le estamos indicando al drone que se incline en el eje Pitch en un sentido o en otro (-30º/+30º) en función de la posición del stick del mando RC.
Para procesar las señales obtenidas del mando y transformarlas en consigna de inclinación, utilizaremos la función map() de Arduino.
// Ecuaciones de procesamiento
RC_Throttle_consigna = map(RC_Throttle_raw, us_min_Throttle_raw, us_max_Throttle_raw, us_min_Throttle_adj, us_max_Throttle_adj);
RC_Pitch_consigna = map(RC_Pitch_raw, us_min_Pitch_raw, us_max_Pitch_raw, us_min_Pitch_adj, us_max_Pitch_adj);
RC_Roll_consigna = map(RC_Roll_raw, us_min_Roll_raw, us_max_Roll_raw, us_min_Roll_adj, us_max_Roll_adj);
RC_Yaw_consigna = map(RC_Yaw_raw, us_min_Yaw_raw, us_max_Yaw_raw, us_min_Yaw_adj, us_max_Yaw_adj);Os dejo el software completo que incluye las ecuaciones de procesamiento. Podéis también descargarlo en el siguiente enlace:
// Declaración de pines
#define pin_INT_Throttle 8 // Pin Throttle del mando RC
#define pin_INT_Yaw 7 // Pin Yaw del mando RC
#define pin_INT_Pitch 12 // Pin Pitch del mando RC
#define pin_INT_Roll 9 // Pin Roll del mando RC
#include <EnableInterrupt.h>
long loop_timer, tiempo_ejecucion;
float RC_Throttle_consigna, RC_Pitch_consigna, RC_Roll_consigna, RC_Yaw_consigna;
// AJUSTE MANDO RC - THROTLLE
const int us_max_Throttle_adj = 2000;
const int us_min_Throttle_adj = 950;
const float us_max_Throttle_raw = 2004; // <-- Si teneis la entrada Throttle invertida sustituid este valor
const float us_min_Throttle_raw = 1116; // <-- por este y viceversa
// AJUSTE MANDO RC - PITCH
const float us_max_Pitch_raw = 1952;
const float us_min_Pitch_raw = 992;
const int us_max_Pitch_adj = -30; // <-- Si teneis la entrada Pitch invertido sustituid este valor
const int us_min_Pitch_adj = 30; // <-- por este y viceversa
// AJUSTE MANDO RC - ROLL
const float us_max_Roll_raw = 1960;
const float us_min_Roll_raw = 992;
const int us_max_Roll_adj = 30; // <-- Si teneis la entrada Roll invertido sustituid este valor
const int us_min_Roll_adj = -30; // <-- por este y viceversa
// AJUSTE MANDO RC - YAW
const float us_max_Yaw_raw = 1928;
const float us_min_Yaw_raw = 972;
const int us_max_Yaw_adj = 30; // <-- Si teneis la entrada Yaw invertido sustituid este valor
const int us_min_Yaw_adj = -30; // <-- por este y viceversa
// INTERRUPCIÓN MANDO RC --> THROTTLE
volatile long Throttle_HIGH_us;
volatile int RC_Throttle_raw;
void INT_Throttle() {
if (digitalRead(pin_INT_Throttle) == HIGH) Throttle_HIGH_us = micros();
if (digitalRead(pin_INT_Throttle) == LOW) RC_Throttle_raw = micros() - Throttle_HIGH_us;
}
// INTERRUPCIÓN MANDO RC --> PITCH
volatile long Pitch_HIGH_us;
volatile int RC_Pitch_raw;
void INT_Pitch() {
if (digitalRead(pin_INT_Pitch) == HIGH) Pitch_HIGH_us = micros();
if (digitalRead(pin_INT_Pitch) == LOW) RC_Pitch_raw = micros() - Pitch_HIGH_us;
}
// INTERRUPCIÓN MANDO RC --> ROLL
volatile long Roll_HIGH_us;
volatile int RC_Roll_raw;
void INT_Roll() {
if (digitalRead(pin_INT_Roll) == HIGH) Roll_HIGH_us = micros();
if (digitalRead(pin_INT_Roll) == LOW) RC_Roll_raw = micros() - Roll_HIGH_us;
}
// INTERRUPCIÓN MANDO RC --> YAW
volatile long Yaw_HIGH_us;
volatile int RC_Yaw_raw;
void INT_Yaw() {
if (digitalRead(pin_INT_Yaw) == HIGH) Yaw_HIGH_us = micros();
if (digitalRead(pin_INT_Yaw) == LOW) RC_Yaw_raw = micros() - Yaw_HIGH_us;
}
void setup() {
// Declaración de interrupciones
pinMode(pin_INT_Yaw, INPUT_PULLUP); // YAW
enableInterrupt(pin_INT_Yaw, INT_Yaw, CHANGE);
pinMode(pin_INT_Throttle, INPUT_PULLUP); // POTENCIA
enableInterrupt(pin_INT_Throttle, INT_Throttle, CHANGE);
pinMode(pin_INT_Pitch, INPUT_PULLUP); // PITCH
enableInterrupt(pin_INT_Pitch, INT_Pitch, CHANGE);
pinMode(pin_INT_Roll, INPUT_PULLUP); // ROLL
enableInterrupt(pin_INT_Roll, INT_Roll, CHANGE);
// Serial.begin()
Serial.begin(115200);
}
void loop() {
// Nuevo ciclo
while (micros() - loop_timer < 10000);
tiempo_ejecucion = (micros() - loop_timer) / 1000;
loop_timer = micros();
// Ecuaciones de procesamiento
RC_Throttle_consigna = map(RC_Throttle_raw, us_min_Throttle_raw, us_max_Throttle_raw, us_min_Throttle_adj, us_max_Throttle_adj);
RC_Pitch_consigna = map(RC_Pitch_raw, us_min_Pitch_raw, us_max_Pitch_raw, us_min_Pitch_adj, us_max_Pitch_adj);
RC_Roll_consigna = map(RC_Roll_raw, us_min_Roll_raw, us_max_Roll_raw, us_min_Roll_adj, us_max_Roll_adj);
RC_Yaw_consigna = map(RC_Yaw_raw, us_min_Yaw_raw, us_max_Yaw_raw, us_min_Yaw_adj, us_max_Yaw_adj);
// Monitor Serie
Serial.print(RC_Throttle_consigna);
Serial.print("\t");
Serial.print(RC_Pitch_consigna);
Serial.print("\t");
Serial.print(RC_Roll_consigna);
Serial.print("\t");
Serial.println(RC_Yaw_consigna);
}Lo mas importante es asegurar que una vez procesadas las señales, el canal de throttle no ha quedado invertido. Es decir, con el stick al mínimo tenemos que obtener una salida de 1000μs aproximadamente, y con el stick al máximo una salida de 2000μs aproximadamente. Si tenéis el canal invertido, corregirlo cambiando de orden los parámetros de entrada. De esto:
const float us_max_Throttle_raw = 2004; // <-- Si la entrada Throttle está invertida sustituid este valor
const float us_min_Throttle_raw = 1116; // <-- por este y viceversaA esto:
const float us_max_Throttle_raw = 1160; // <-- Si la entrada Throttle está invertida sustituid este valor
const float us_min_Throttle_raw = 2004; // <-- por este y viceversaComprobar también los demás canales, y en caso de tener alguno invertido, seguid el mismo procedimiento que con el canal throttle hasta ajustarlos como se muestra a continuación:
- Moviendo stick de Pitch hacia arriba, RC_Pitch_consigna = -30º aprox.
- Moviendo stick de Pitch hacia abajo, RC_Pitch_consigna = +30º aprox.
- Moviendo stick de Roll hacia la derecha, RC_Roll_consigna = +30º aprox.
- Moviendo stick de Roll hacia la izquierda, RC_Roll_consigna = -30º aprox.
- Moviendo stick de Yaw hacia la derecha, RC_Yaw_consigna = +30º aprox.
- Moviendo stick de Yaw hacia la izquierda, RC_Yaw_consigna = -30º aprox.
Las implicaciones de no hacer esta modificación en los canales Pitch, Roll y Yaw no son tan graves, simplemente, cuando ordenáramos al drone ‘avanzar’, este retrocedería. Nada grave, pero conviene corregirlo.
Acordaos de cambiarlo también cuando descargues el software principal en la entrada número 9.
Continuar con la siguiente entrada:
- Conceptos generales sobre drones
- Material necesario y montaje de los componentes hardware
- Mando RC y receptor. Programación en Arduino
- → MPU6050 y su programación en Arduino
- Batería LiPo
- Control de estabilidad y PID
- Motores, ESC y su programación en Arduino
- Calibración de hélices y motores
- Software completo y esquema detallado
- Probando el Software completo antes de volar
- Como leer variables de Arduino en Matlab

Como leer variables de Arduino en Matlab

Tutorial Arduino ultra bajo consumo (90uA)

caballero buenas tardes mi nombre es kevin de Colombia medellin, era para decir y felicitarlo por poner esta pagina o bloc es muy interesante porque este es un proyecto de hoy lo único que le doy como concejo para que hubiera quedado mas completo hubieras montado vídeos de como calibrar receptor, mpu 6050, y motores porque la verdad esta muy bien explicado pero uno como persona al menos yo, me gusta ver en practica para que quede mejor pero igual amigo felicidades.
Buenas Kevin!! Gracias por e comentario.
Tengo vídeos de como calibrar los motores y de como poner el marcha el drone una vez montado. Pensé que con eso y las explicaciones de bog seria suficiente. Me lo apunto como tarea pendiente.
Un saludo y animo!! 😉
Hola! felicitaciones, tu proyecto quedó genial! dónde puedo encontrar los videos que comentaste que tienes? sería de gran ayuda, anticipadamente te agradezco.
Hola Kevin, los tienes en la propia entrada o en el canal de Youtube:
ArduProject Arduino
Un saludo!
A bueno caballero con mucho gusto lo del vídeo de calibración de motores no lo había visto esta excelente , tambien era para preguntarte estoy confundido con lo del censor UD pone lo del censor para configurarlo o muestra cómo está configurado. Y también compa lo de lo último que es par calibrar mando para que lo lea todo sobre lo último que ya es para que funcione del todo y no me da el código lo cargo y no me da osea me explico yo lo pongo en el programa de Arduino y lo verifico y no me da, en qué estoy fallando muchas gracias caballero, tambn si me puedes dar un número de wassap para contactarme más fácil y ya arreglamos me interesa terminarlo gracias
Primero de todo, muchas gracias por el post y toda la información!
Tengo un par de preguntas:
– Cuál es el alcance del mando?
– Cuál es el empuje de los motores? Es para saber el peso máximo que puede tener el drone y su podría llevar una cámara GoPro o similar.
Saludos
Buenas Sergi,
– El alcance del mando depende del mando que tengas… con el mio, si no hay obstáculos en el camino, es de unos 300m.
– El empuje de los motores no sabría cuantificarlo ni medirlo. Una GOPRO de sobra…
Un saludo
El mío no kiere dar😔😔
Buenas Roberto. Que significa que no quiere dar?
Hola buenas noches, tengo una duda, estoy intentanto hacer este drone pero no puedo comprar el mando y estaba haciendo una app de android para manejarlo, pero no entiendo como funcina la parte de if (digitalRead(8) == HIGH) contPotenciaInit = micros();
if (digitalRead(8) == LOW)PulsoPotencia = micros() – contPotenciaInit;
y como la puedo adecuar a una barra de progreso en la app.
Que me recomendarias?
Que tal compañero, la verdad para un dron de esta talla no creo que controlarlo con una app Mobil sea lo mas eficiente, pero si es lo que esta a mano es completamente válido, si tienes una Tienda de electrónica en tu ciudad puedes comprar unos módulos de radiofrecuencia nrf24 junto con un atmega 328, o un arduino nano, podrías crear un mando con su receptor, y es muy econico, rondará talvez los €25
Hola Buenas, construi el DRONE exactamente igual, lo unico no dispongo del mando RC, me podrias dar una mano para controlar el drone por bluetooth a traves de la app Universal RC Transmitter. Gracias
Buenas Thomas,
Lo siento, nunca he trabajado con módulos Bluetooth hasta ahora. Seguro que en internet encuentras infinidad de tutoriales y librerías.
Suerte!!
Hola Como andas, mira estuve buscando en internet y encontre un pdf en el que se construye un drone con los mismos materiales de este proyecto, y se quiere controlarlo por bluetooth a traves de una APK, estoy siguiendo todos los pasos pero hay un error que no puedo solucionar. En el archivo principal dentro del setup se llama a una funcion inicializar_VariablesErrorPID(), que no existe en ninguna parte del codigo, suponemos que esta funcion es para estabilizar el drone, pero no existe. Nos podrias ayudar a reconstruir esa parte ?, el codigo esta al final del documento PDF. Gracias
Link: https://riunet.upv.es/bitstream/handle/10251/75899/BAGUENA%20-%20Dise%C3%B1o%20y%20control%20de%20un%20cuadric%C3%B3ptero%20controlado%20por%20bluetooth%20via%20Android%20App.pdf?sequence=1
Buenas Thomas,
Tendrás que contactar con la persona que hizo ese trabajo, yo no te puedo ayudar. Si tienes cualquier duda sobre algo relacionado con este blog, no dudes en preguntar 😉
Suerte!
Buenas! Ante todo gracias por escribir el blog y por todos los códigos.
Con los valores obtenidos, el throttle al mínimo alcanza aproximadamente los 1000 (mi throttle está invertido) y al máximo 1500, es decir, no llega a los 2000. He incluido los valores que he calculado previamente pero no consigo llegar a ese valor. No sé a que puede deberse, espero pueda ayudarme a resolver la duda, gracias!
Buenas,
Que raro…. ¿obtienes la misma salida en todos los canales? de todas formas por software es muy sencillo hacer que llegue hasta 2000us.
Un saludo
Hola. Soy fanatico de Arduino y me estoy metiendo en el mundo de los drones (controlados por Arduino). Queria saber si hay alguna forma de unir el modulo receptor del wifi al arduino del dron sin pasar por un intermediario. Por mi parte jugare un poco a ver si me sale, pero desearia saber por que debe ser con un receptor externo y de ahi a pines y no el WiFi directo a la placa Arduino del dron. Excelente todo!!! Gracias!!!
Buenas Xakko,
Yo no he utilizado WIFI para controlar el drone. Mando RC con receptor simplemente.
Un saludo!
a alguien le ha funcionado el dron con este tutorial?ya compre las todo y quiero hacerlo pero no veo que a alguien mas a parte de arduproyec le haya funcionado.
Buenas Alexandre,
Hay gente que lo ha conseguido, y hay gente que no.
Este blog es una ayuda para construir un drone, donde además pongo el código que a mi me ha funcionado y en el que tanto he trabajado. No es un producto comercial.
Recuerda que es algo gratuito, que no gano nada por atraer a gente al blog.
Un saludo
Buenas,
sabes si existe alguna libreria para poder utilizar las interrupciones en arduino nano every??
esque tengo problemas con arduino nano cuando declaro esta libreria y utilizo sus funciones, lo que no me pasa en arduino uno, pero claro no es lo mismo montar un arduino uno que uno nano en un dron.
Un saludo.
Buenas, no conozco esa placa. La que he utilizado yo es la librería #include
Prueba con esa.
Utilizar un Nano o un Uno es indiferente, funcionará con ambas.
Un saludo
Enhorabuena por tu proyecto , y por el tiempo que le has dedicado a detallarlo paso a paso , y de esta forma compartirlo con todos.
Enhorabuena y gracias.
Mil gracias!! 🙂
Hola he estado mirando tu código y me pregunto si funcionará bien, corrígeme si me equivoco, pero según veo , asocias al duración del pulso con la salida de potencia, pero aunque varíe en el tiempo siempre se le esta suministrando la potencia máxima la motor, entonces no estas controlando la potencia suministrada al motor como con un potenciometro, si no que envías un flanco positivo cada vez que se activa el receptor.
lo mismo ocurriría con la inclinación, a la hora de mover el roll se inclinara 30º según veo, pero siempre sera esta inclinación, por lo tanto no se están cambiado los grados de inclinación sino que siempre son los mismo 30º.
Buenas,
La potencia se controla exactamente igual que con un potenciómetro. No es fácil explicar esto de forma resumida en un comentario, para eso está la entrada.
Cuando cargues el código y lo veas funcionar, lo entenderás mejor 😉
hola
que significa los canales de la radio control y si tiene mas canales que pasaria es mejor?
Tendrás mas grados de libertad con el drone. Un mando con mas canales siempre es mejor a largo plazo, por si quieres añadir nueva funcionalidades al drone.
Un saludo
arduproyect, Saludos desde Colombia. Felicitarlo por tan inmenso y arduo trabajo. Estoy en la face terminal del proyecto haciendo pruebas de vuelo, me surge un inconveniente a la hora de alzar vuelo en el despegue, y revisando el código más a profundidad en el sketch de prueba de mando RC. (Mandocompletoproces) me di cuenta de que mi control no está dando los valores en 0 ni tan cercanos a 0 estando todas las entradas en posición media, ni en el eje pitch, ni en el roll, ni en el yaw, y en punto máximo y mínimo tampoco se aproximan a (30) ni (-30). Creo que de allí se deriva de que al levantar vuelo a 5cm del piso empieza a inclinarse hacia uno de sus ejes sin antes mandar ninguna orden de inclinación desde el mando estando aún todos las entradas en punto media que debería ser 0° grados. Un dato adicional mi control RC no está muy bien calibrado de fábrica ya que al leer los valores en bruto (microsegundos) por el puerto serial con serial.print me da los siguientes datos, para el trotl en estado mínimo (1.884)u media (1.336)u máxima(880)u. Para el eje pitch mínimo (1.332)u media(1.580)u máxima(1.832)u. Para el eje roll mínimo(1.284)u media (1.524)u máxima(1.788)u. Para el eje yaw mínimo(1.320)u media (1.576)u máxima(1820)u. Como puede ver ninguna se aproxima a 1000 en estado mínimo ni 1500 en estado media ni 2000 en máxima… Para mi entender no es falla del trotl ya que aunque no tenga los balores sercanos a lo establecido este es capas de dar su potencia en campo para alzar el vuelo y también es capaz de disminuir con gran precisión al aterrizar hasta apagar motores por completo si volver a ponerlos en marcha si damos potencia (trotl). Por favor deme un consejo que devo corregir o implementar. Muchísimas gracias por su ayuda y por el proyecto, le deseo lo mejor.
Buenas Davinson! perdona por la demora, he estado ausente un par de meses por temas personales, y no he podido entrar en ese tiempo. Es un problema bastante común. Es imprescindible que con el mando esté bien ajustado antes de hacer pruebas de vuelo. ¿Has logrado corregir el problema? sin tocar las palancas del mando, la consigna tiene que ser 0 para pitch, roll y yaw. La clave podría estar en estas lineas de código:
// Si las lecturas son cercanas a 0, las forzamos a 0 para evitar inclinar el drone
// por error
if (wPitchFilt < 9 && wPitchFilt > -9)wPitchConsigna = 0; // ‘9’ por un error de fabrica de mi mando
if (wRollFilt < 3 && wRollFilt > -3)wRollConsigna = 0;
if (wYawlFilt < 3 && wYawlFilt > -3)wYawConsigna = 0;
A mi me ha funcionado hay que dedicarle tiempo a comprender el código por ende aprender el lenguaje de programaciones si es que quieres implementar, si lo que quieres es solo armarlo sigue los pasos tal cual y te funcionará a la perfección
Buenas Davinson! Me alegra mucho que te haya ido bien… como bien dices, hay que tomar tiempo para entender el código y solucionar los problemas que surjan.
Un saludo
Buenas tardes, estoy realizando este proyecto, pero cuando cargo el primer código de esta entrada del blog el monitor serial solo imprime el signo de interrogación seguido de los valores que se deberían obtener en 0, alguna idea de cual es el problema?
Dejo aquí exactamente el output para que lo veais:
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮⸮…
Buenas,
Has configurado bien el baudrate del canal serie de Arduino? tiene que coincidir con lo que pongas en esta línea de código:
Serial.begin(115200);
Revisa también el cableado, los pines que he utilizado yo y los que has usado tu son los mismos seguro?
Un saludo
Una pregunta, serviria el mando FlySky T-6 con el transmisor que has utilizado, el R6B?
Y habría que cambiar parte del código si se utiliza un controlador distinto al que has utilizado? Muchas gracias.
Perdón, quería decir FlySky i6, FS-i6. Pero en general el código no tiene que cambiar verdad? Si es así, podrías decirme por qué; para que yo pueda deducir el código entendiendo el problema o la diferencia general entre los sketch.
Hola, yo estoy utilizando el F6-i6 y lo unico que veo por el puerto serie es un simbolo cuadrado continuamente.
Muchas gracias
Buenas Eduardo,
Has configurado bien el baudrate del canal serie de Arduino? tiene que coincidir con lo que pongas en esta línea de código:
Serial.begin(115200);
Si solucionas el problema ponlo en los comentarios 😉
Un saludo
El receptor que has utilizado ¿enciende algún LED cuando funciona correctamente?
Tiene un led para saber el estado de carga de las pilas, pero no si funciona correctamente.
Un saludo
Hola,
Efectivamente no me di cuenta de que yo tengo que poner el serial.begin(9600)
Una vez hecho esto, subí el programa y la potencia iba de 1205 a 15014
// MANDO POTENCIA
const int PulsoMaxPotencia = 2000; » lo sustituyo a qui» 15014
const int PulsoMinPotencia = 980; » lo sustituyo a qui » 1205
const float tMaxPotencia = 1.72; // <— Este valor de donde sale, No consigo verlo en la
explicación
const float tMinPotencia = 1.06; // <— Este valor de donde sale
Cuando cargo el software completo me da tiempo excedido (LED 13)
Gracias.
Hola de nuevo, rectifico el valor de máxima es 1514, se me colo un «0»
Perdon
Hola, ya me voy aclarando, mis lecturas son:
PulsoMaxPotencia = 1516
PulsoMinPotencia = 1012
tMaxPotencia = 1.50
tMinPotencia = 1.01
Pich max +50
Pich min -50
Yaw max +50
Yaw min -50
Roll max +50
Roll min -50
Todavia no consigo hacer funcionar los motores. Voy a poner el display haber si así veo donde me falla.
Gracias
Hola, yo de nuevo, siento ser pesado pero espero que esto sirva para los que tengan algún problemilla.
He conectado el display y parece que va todo bien hasta que llego aqui
lcd.print(«Calibrar motores»);
// Calibrar motores –> Mover stick de Roll a la derecha para continuar. Simplemente mandamos pulsos de 1000us (pulso minimo) a los motores.
// Hasta no hacerlo no salimos de este bucle. Con esto conseguimos entrar al loop principal con los motores listos para girar.
// Se puede comentar si se quiere, no es imprescindible.
while (wRoll < 20) {
pulsoPotencia = ((PulsoMaxPotencia – PulsoMinPotencia) / (tMinPotencia – tMaxPotencia)) * ((PulsoPotencia) / 1000.00 – tMaxPotencia) + PulsoMinPotencia;
wRoll = ((wMaxRoll – wMinRoll) / (tMax – tMin)) * ((PulsoRoll – calRoll) / 1000.00 – tMin) + wMinRoll;
Muevo el Roll y me salta el led 13 de ciclo sobrepasado y no se mueven los motores
Hola de nuevo, he conseguido que haga las calibraciónes y que cuando muevo el roll ya no me salta el led 13, me parpadea el led azul y los motores no se mueven.
Gracias
Hola Buenas! He tenido un problema, he conectado todos los canales con sus respectivos pines en la placa arduino entonces al comprobar la longitud de pulso de cada canal me falla una, yaw, pitch y throttle funcionan bien (adquieren valores entre 1000 y 2000) pero el problema viene al mover la palanca respectiva al roll, el valor no cambia y permanece constante en 1472. ¿Algun consejo?
He probado a cambiar de puerto todas las conexiones, incluso he montado el circuito en una tarjeta arduino uno y sigue sin detectar el movimiento hacia la derecha y izquierda del joystick derecho. Antes de intentar montar este controlador de vuelo usaba otro distinto en el cual si funcionaba el roll así que no creo que sea problema de la emisora.
Buenas,
Me parece raro que funcionen todos los canales menos unos, cuando el código es igual para todos. Por ejemplo, el pitch te funciona bien. ¿A que canal lo tienes conectado? ¿has probado a conectar el Roll a ese canal (que ya sabemos que funciona bien)?
Un saludo
Claro que si Alexander a mi si me funciono. Lo hice exactamente como el proyecto esta indicado. solo tuve algunos contratiempos por que soy novato en Arduino pero si me funciono. Me encanto.
🙂
Fascinante el detalle del proyecto. Sin duda un punto de partida inminente para montar mi primer drone. Queria pedirte si tienes algun mail para poder contactarme directamente contigo sin tener que pasar por el blog para poder evacuar dudas y otros detalles que vayan surgiendo. Un saludo desde Argentina
Buenas Leonardo, gracias 😉
Tiene mi email debajo de ‘Páginas más vistas’ en la página principal, pero intenta poner las dudas en los comentarios, de esta forma todo el mundo puede verlas.
Hola buenas tardes, tengo el dron que ya anda volando, solo que se me estuvo complicando mantenerlo estable, hasta que empeze a jugar con los trimmers y logre estabilizarlo en pitch y roll al despegar, el unico problema es que en yaw no logro hacerlo. El dron gira para la la izquierda sobre si mismo, y poniendo el trimmer al maximo hacia la derecha logro reducirlo, pero sigue girando y se complica direccionarlo. Supongo que tendre que toquetear el wMaxyaw y wMinyaw, pero queria consultarte si es lo correcto o si debo chequear el problema por otro lado. Las helices ya las calibre con tu programa. Aclaro por si es que suma, que en mi caso estoy armando un hexacopetro (solo le agrege 2 motores mas al codigo de PWM). Y de estos hay 3 motores que rotann en senntido horario y otros 3 en antihorario, cada uno enfrentado con el opuesto. Muchas gracias y que tengas un buen dia.
Cordial saludo tengo una duda y creo que por eso se daño mi emisora MICROZONE MC7RB tu conectas 5v y gnd en el Bat mi emisora no dice bat si M.bus se supone que conecto hay los 5v y gnd .. o conecto cada canal con su respectivo 5v y gnd al arduino
Agradezco su pronta respuesta
Buenas tardes, quería comentar que ya encontré la solución al problema. El tema estaba en la señal de yaw que se le asigna a cada motor. En este caso, yo le asignaba a los motores de giro inverso que el yaw se reste, por lo cual el PID cuando quería contrarrestar, el dron aumentaba el error, y eso generaba un círculo vicioso que hacía que el mismo girase sobre si a lo loco. Una cosa sencilla que no tuve en cuenta al armar el hexadron. Espero que esto le sirva a alguno que llegase a caer en el mismo error. Muchas gracias
Hola, es una pasada, y en español de españa, con tu permiso te estoy copiando parte del codigo es para un coche, pero vale perfectamente, modificandolo por supuesto, estoy con la parte de radio control y me asaltan dos dudas, porque cuando apago el mando el receptor sigue emitiendo y la segunda como puedo saber si el mando esta apagado o fuera de rango, gracias
Tengo una duda de que sustituir aquí:
// AJUSTE MANDO RC – THROTLLE
const int us_max_Throttle_adj = 2000;
const int us_min_Throttle_adj = 950;
const float us_max_Throttle_raw = 2004; // < – Si teneis la entrada Throttle invertida sustituid este valor
const float us_min_Throttle_raw = 1116; // < – por este y viceversa
El mando me ha dado unos parametros, de yaw, throttle, roll y pithc.
Donde los tengo que poner exactamente porque no me queda claro, y no consigo que el dron despegue del suelo, se aceleran mucho los motores, incluso algunas veces varios de ellos se paran, pero no llega a despegar ni un poco con la batería recién cargada.
¿Tengo que cambiar todos los valores por los que me ha dado el mando o solo dos de ellos? ¿Cuales? Porque no me queda muy claro.
Muchas gracias por su ayuda
en la programacion de mando y receptor en la lectura de datos en el arduino me salen puros signos de interrogacion y cuadros
Si instalo el FLY SKY FS-X6B y me comunico mediante interrupciones, para que me sirve tener instalado en mi BOARD el NFR24-L01?
¿Qué material necesito para conectar los pines del receptor con la placa arduino? ¿Tienes una fotografía en la que se vea mejor el conexionado? Gracias