MPU6050 y su programación en Arduino
Índice:
- Conceptos generales sobre drones
- Material necesario y montaje de los componentes hardware
- Mando RC y receptor. Programación en Arduino
- → MPU6050 y su programación en Arduino
- Batería LiPo
- Control de estabilidad y PID
- Motores, ESC y su programación en Arduino
- Calibración de hélices y motores
- Software completo y esquema detallado
- Probando el Software completo antes de volar
- Como leer variables de Arduino en Matlab
El sensor MPU6050
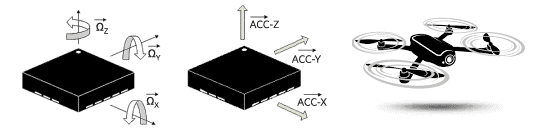
IMU o Inertial Mesurment Module es el sensor más importante del drone y sin el cual es imposible mantener el drone en el aire de forma autónoma. Este pequeño sensor proporciona lecturas de velocidad de rotación (giroscopio) y aceleración en los tres ejes de movimiento (acelerómetro). Procesando adecuadamente estas señales podremos obtener las dos variables imprescindibles para volar el drone: la velocidad de rotación de los tres ejes en grados por segundo (º/s) y la inclinación del drone (º). El sensor que yo utilizo es el MPU6050.

Código Arduino para lectura del sensor MPU6050
Mas adelante os dejo el código que yo uso para la lectura y procesamiento de los datos del sensor MPU6050, pero en primer lugar vamos a entender las diferentes partes de este código. El primer paso es configurar el sensor. A la hora de hacerlo hay varios parámetros que podemos configurar, como la sensibilidad y escala del sensor o la frecuencia de corte del filtro LPF (low pass filter) que incorpora a la salida. La configuración que he escogido es de 500dps para el giroscopio, +/-8g para el acelerómetro y 98Hz de frecuencia de corte para el filtro de salida. Nos os preocupéis si no entendéis estos conceptos, mas adelante en este post iremos explicándolos mas en detalle:
// Iniciar sensor MPU6050
void MPU6050_iniciar() {
Wire.beginTransmission(MPU6050_adress);
Wire.write(0x6B); //Registro 6B hex)
Wire.write(0x00); //00000000 para activar giroscopio
Wire.endTransmission();
Wire.beginTransmission(MPU6050_adress);
Wire.write(0x1B); //Register 1B hex
Wire.write(0x08); //Giroscopio a 500dps (full scale)
Wire.endTransmission();
Wire.beginTransmission(MPU6050_adress);
Wire.write(0x1C); //Register (1A hex)
Wire.write(0x10); //Acelerómetro a +/- 8g (full scale range)
Wire.endTransmission();
Wire.beginTransmission(MPU6050_adress);
Wire.write(0x1B);
Wire.endTransmission();
Wire.requestFrom(MPU6050_adress, 1);
while (Wire.available() < 1);
// Activar y configurar filtro pasa bajos LPF que incorpora el sensor
Wire.beginTransmission(MPU6050_adress);
Wire.write(0x1A);
Wire.write(0x04);
Wire.endTransmission();
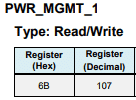
}Si acudimos al datasheet del MPU6050 vemos como estos números que utilizamos en la configuración tienen perfecto sentido. En primer lugar utilizamos el registro 6B para activar el modo configuración del sensor y poder modificar los parámetros internos:

El registro 1B para configurar el giroscopio:

![]()
El registro 1C para configurar el acelerómetro:


Y finalmente el filtro pasa bajos de la salida:


Tened en cuenta que filtrar la salida introduce un retardo en las lecturas del sensor que puede llegar a los 20ms, tened esto en cuenta a la hora de configurar el filtro. En función del nivel de vibraciones que tengamos en el frame después de calibrar los motores y las hélices, habrá que filtrar mas o menos la salida:

Una vez configurado el sensor basta con ir haciendo lecturas periódicas, para lo que utilizaremos las siguientes lineas de código. Simplemente avisamos al sensor de que necesitamos una nueva lectura, y este nos contesta con toda la información:
// Leer sensor MPU6050
void MPU6050_leer() {
// Los datos del giroscopio y el acelerómetro se encuentran de la dirección 3B a la 14
Wire.beginTransmission(MPU6050_adress); // Empezamos comunicación
Wire.write(0x3B); // Pedir el registro 0x3B (AcX)
Wire.endTransmission();
Wire.requestFrom(MPU6050_adress, 14); // Solicitar un total de 14 registros
while (Wire.available() < 14); // Esperamos hasta recibir los 14 bytes
ax = Wire.read() << 8 | Wire.read(); // 0x3B (ACCEL_XOUT_H) & 0x3C (ACCEL_XOUT_L)
ay = Wire.read() << 8 | Wire.read(); // 0x3D (ACCEL_YOUT_H) & 0x3E (ACCEL_YOUT_L)
az = Wire.read() << 8 | Wire.read(); // 0x3F (ACCEL_ZOUT_H) & 0x40 (ACCEL_ZOUT_L)
temperature = Wire.read() << 8 | Wire.read(); // 0x41 (TEMP_OUT_H) & 0x42 (TEMP_OUT_L)
gx = Wire.read() << 8 | Wire.read(); // 0x43 (GYRO_XOUT_H) & 0x44 (GYRO_XOUT_L)
gy = Wire.read() << 8 | Wire.read(); // 0x45 (GYRO_YOUT_H) & 0x46 (GYRO_YOUT_L)
gz = Wire.read() << 8 | Wire.read(); // 0x47 (GYRO_ZOUT_H) & 0x48 (GYRO_ZOUT_L)
}A continuación os dejo el código de lectura de valores raw (valores en crudo y sin procesar) del sensor, podéis ejecutarlo y ver los valores que lee vuestro sensor. Si ejecutamos el código y visualizamos estos valores raw por el canal serie, veremos cómo estos números tienen poco o ningún sentido para nosotros, pero realmente toda la información que necesitamos está entre esos números, oculta. Toda la información que necesitamos para volar el drone (la velocidad de rotación de los tres ejes en grados por segundo (º/s) y la inclinación del drone (º)) hay que conseguirla procesando estos datos raw. El montaje necesario es muy simple**:

Es muy importante cablear el sensor MPU6050 de forma robusta, asegurando que ninguno de los cables se va a soltar aunque el drone caiga e impacte contra el suelo de forma agresiva. Perdí varios meses intentando averiguar que sucedía con mi drone, ya que el software, tras un impacto, quedaba ‘muerto’, teniendo que resetearlo para poder devolverlo a la vida. El problema era que a raíz de un cableado poco robusto y tras un impacto, el sensor perdía la alimentación durante un breve instante, pero suficiente para apagar y encenderlo. La placa Arduino, que no perdía la alimentación, seguía ejecutando el código de forma normal hasta llegar al comando while(Wire.available() < 14); donde el software quedaba atascado y esperando a recibir la información del sensor MPU6050, información que nunca llegaba debido a que el sensor había sido reseteado por el corte de alimentación y recordad que es necesario inicializarlo tras cada apagado para poder utilizarlo.
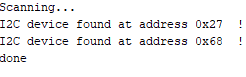
La dirección por defecto de todos los sensores MPU6050 que he utilizado a sido siempre 0x68, pero puede pasar que la dirección de vuestro sensor sea diferente. Para saber exactamente cual es la dirección podéis utilizar el siguiente código, simplemente cableáis y alimentáis el sensor como hemos visto mas arriba y ejecutáis el código. En el monitor serie aparecerá la dirección de todos los periféricos I2C que tengáis conectados.
Hecho esto, nos ponemos a programar 😉 Todo el software que utilizaremos a lo largo de esta entrada está subido a GitHub:
Código para lectura de valores raw (es necesario instalar la librería Wire.h). Cargad y ejecutad el código. Moved el sensor con la mano y comprobad que los valores cambian. A continuación veremos como entender y procesar toda esta información:
#include <Wire.h>
// MPU6050
#define MPU6050_adress 0x68
int gx, gy, gz;
float ax, ay, az, temperature;
void setup() {
Wire.begin();
Serial.begin(115200);
// Iniciar sensor MPU6050
MPU6050_iniciar();
}
void loop() {
// Leer sensor MPU6050
MPU6050_leer();
// Monitor Serie
Serial.print(ax);
Serial.print("\t");
Serial.print(ay);
Serial.print("\t");
Serial.print(az);
Serial.print("\t");
Serial.print(gx);
Serial.print("\t");
Serial.print(gy);
Serial.print("\t");
Serial.println(gz);
}
// Iniciar sensor MPU6050
void MPU6050_iniciar() {
Wire.beginTransmission(MPU6050_adress);
Wire.write(0x6B); // PWR_MGMT_1 registro 6B hex
Wire.write(0x00); // 00000000 para activar
Wire.endTransmission();
Wire.beginTransmission(MPU6050_adress);
Wire.write(0x1B); // GYRO_CONFIG registro 1B hex
Wire.write(0x08); // 00001000: 500dps
Wire.endTransmission();
Wire.beginTransmission(MPU6050_adress);
Wire.write(0x1C); // ACCEL_CONFIG registro 1C hex
Wire.write(0x10); // 00010000: +/- 8g
Wire.endTransmission();
}
// Leer sensor MPU6050
void MPU6050_leer() {
// Los datos del giroscopio y el acelerómetro se encuentran de la dirección 3B a la 14
Wire.beginTransmission(MPU6050_adress); // Empezamos comunicación
Wire.write(0x3B); // Pedir el registro 0x3B (AcX)
Wire.endTransmission();
Wire.requestFrom(MPU6050_adress, 14); // Solicitar un total de 14 registros
while (Wire.available() < 14); // Esperamos hasta recibir los 14 bytes
ax = Wire.read() << 8 | Wire.read(); // 0x3B (ACCEL_XOUT_H) & 0x3C (ACCEL_XOUT_L)
ay = Wire.read() << 8 | Wire.read(); // 0x3D (ACCEL_YOUT_H) & 0x3E (ACCEL_YOUT_L)
az = Wire.read() << 8 | Wire.read(); // 0x3F (ACCEL_ZOUT_H) & 0x40 (ACCEL_ZOUT_L)
temperature = Wire.read() << 8 | Wire.read(); // 0x41 (TEMP_OUT_H) & 0x42 (TEMP_OUT_L)
gx = Wire.read() << 8 | Wire.read(); // 0x43 (GYRO_XOUT_H) & 0x44 (GYRO_XOUT_L)
gy = Wire.read() << 8 | Wire.read(); // 0x45 (GYRO_YOUT_H) & 0x46 (GYRO_YOUT_L)
gz = Wire.read() << 8 | Wire.read(); // 0x47 (GYRO_ZOUT_H) & 0x48 (GYRO_ZOUT_L)
}Una vez obtenidos los valores raw es necesario procesar esta información de forma adecuada para obtener la velocidad de rotación en grados por segundo (º/s) y la inclinación del drone (º). Para calcular la velocidad de rotación en º/s bastará con utilizar las lecturas de rotación que entrega el sensor y ajustarlas en función de la configuración que hayamos escogido para el giroscopio. Para calcular la inclinación en cambio, habrá que combinar las lecturas del giroscopio y del acelerómetro del sensor y utilizar algunas funciones matemáticas que explicaremos mas adelante.
En primer lugar procesaremos la información obtenida del acelerómetro. La aceleración medida por el sensor dependerá de la sensibilidad que hayamos escogido, en este caso de ±8g. Según la tabla del datasheet del sensor, cada 4096LSB que leamos en raw (en las variables ax, ay, az), equivale a 1g de aceleración, o lo que es lo mismo, a 9.8m/s2. Por ello, dividiendo los valores raw de aceleración entre 4096 obtendremos la aceleración en ‘g‘:

Por lo tanto, y con esta configuración, deberemos leer valores raw cercanos a 0 en los ejes ‘ax’ y ‘ay‘ y valores cercanos 4096 para el eje ‘az’, equivalente a 1g o a 9.8m/s², ya que estaremos midiendo la aceleración terrestre. Nos os preocupéis si al visualizar estas variables os encontrarais con valores diferentes a estos, todos los sensores tienen un offset o error de medida que hará que nunca leamos exactamente 0. El offset lo compensaremos mas adelante calibrando el sensor.
Para la velocidad de rotación en cambio, configurando el sensor para una sensibilidad de ±500dps, cada 65.5LSB de lectura raw (en las variables gx, gy, gz) equivalen a 1º/s de velocidad de rotación:

Por tanto, basta con coger el valor raw de velocidad (gx, gy, gz) que leemos del sensor y dividirlo entre 65.5 para obtener la velocidad de rotación en º/s. Si hubiéramos seleccionado una sensibilidad de ±2000dps, habría que dividir el valor raw entre 16.4. Así de simple, ya tenemos la velocidad de rotación en º/s :
gyro_X = gx / 65.5;
gyro_Y = gy / 65.5;
gyro_Z = gz / 65.5;Calcular el ángulo de inclinación (º) de cada eje es algo más complicado, pero nada que no se pueda entender dedicándole algo de tiempo. El concepto principal es muy simple, si sabemos la velocidad de rotación y el tiempo que ha estado rotando a esta velocidad, podemos fácilmente calcular los grados que ha rotado en un determinado eje. Por ejemplo, si el drone gira a una velocidad de 10º/s durante 1 segundo, el drone se habrá inclinado 10º. Es como ir con el coche a 100km/h durante una hora, habremos recorrido exactamente 100km. El código necesario es muy simple, basta con multiplicar la velocidad de rotación por el tiempo de ejecución del código:
angulo_pitch += gyro_X * tiempo_ejecucion / 1000;
angulo_roll += gyro_Y * tiempo_ejecucion / 1000;Pero no es oro todo lo que reluce. El problema viene debido a un fenómeno llamado drift o deriva en castellano, que aparece siempre que intentamos estimar la inclinación utilizando medidas únicamente del giroscopio. Haced una pequeña buscado por Google y encontraréis infinidad de información sobre este asunto. Yo paso directamente a la solución de este problema, que es complementar el cálculo de la inclinación con medidas del acelerómetro y un filtro complementario. De esta forma compensamos la desviación producida por el efecto drift:
// Filtro complementario
if (set_gyro_angles) {
angulo_pitch = angulo_pitch * 0.99 + angulo_pitch_acc * 0.01;
angulo_roll = angulo_roll * 0.99 + angulo_roll_acc * 0.01;
}Las lecturas del acelerómetro pueden ser extremadamente ruidosas si tenemos vibraciones no deseadas en el drone (por ejemplo si las hélices no están bien calibradas). Este ruido en las mediciones puede generar errores graves en la estimación de la inclinación. Este problema lo atajaremos mas adelante en otro post dedicada al tema de las vibraciones.
Finalmente, conviene siempre calibrar el sensor y eliminar el offset para una estimación de la inclinación lo más precisa posible. Lo que yo hago es calibrar el giroscopio y el acelerómetro de forma separada durante la inicialización del software. Para ello, tomo 3000 muestras tanto del giroscopio como del acelerómetro y calculo el valor medio, que será el offset de nuestro sensor (es imprescindible mantener el sensor los más estático posible durante la calibración). Este método el mucho mas precio que apuntar manualmente los valores de offset, llegando a obtener un error la estimación de la inclinación de únicamente 0.01º con este método.
A continuación os dejo el código completo para que podéis ejecutarlo vosotros mismo:
/*
Leer sensor MPU6050 (datos raw o sin procesar)
Más información en https://arduproject.es/mpu6050-y-su-programacion/
*/
#define usCiclo 5000 // Ciclo de ejecución de software en microsegundos
#include <Wire.h>
// MPU6050
#define MPU6050_adress 0x68
float gyro_Z, gyro_X, gyro_Y, temperature, gyro_X_cal, gyro_Y_cal, gyro_Z_cal;
int gx, gy, gz, cal_int;
float acc_total_vector, ax, ay, az;
bool set_gyro_angles, accCalibOK = false;
float acc_X_cal, acc_Y_cal, acc_Z_cal, angulo_pitch_acc, angulo_roll_acc, angulo_pitch, angulo_roll;
long tiempo_ejecucion, loop_timer;
void setup() {
Wire.begin();
Serial.begin(115200);
// Iniciar sensor MPU6050
MPU6050_iniciar();
// Calibrar giroscopio y acelerómetro. El sensor tiene que estar inmovil y en una supercifie plana.
// Leer los datos del MPU6050 3000 veces y calcular el valor medio
for (cal_int = 0; cal_int < 3000 ; cal_int ++) {
MPU6050_leer(); // Leer sensor MPU6050
gyro_X_cal += gx;
gyro_Y_cal += gy;
gyro_Z_cal += gz;
acc_X_cal += ax;
acc_Y_cal += ay;
acc_Z_cal += az;
delayMicroseconds(50);
}
gyro_X_cal = gyro_X_cal / 3000;
gyro_Y_cal = gyro_Y_cal / 3000;
gyro_Z_cal = gyro_Z_cal / 3000;
acc_X_cal = acc_X_cal / 3000;
acc_Y_cal = acc_Y_cal / 3000;
acc_Z_cal = acc_Z_cal / 3000;
accCalibOK = true;
loop_timer = micros();
}
void loop() {
// Nuevo ciclo
while (micros() - loop_timer < usCiclo);
tiempo_ejecucion = (micros() - loop_timer) / 1000;
loop_timer = micros();
MPU6050_leer(); // Leer sensor MPU6050
MPU6050_procesar(); // Procesar datos del sensor MPU6050
// Monitor Serie
Serial.print(angulo_pitch);
Serial.print("\t");
Serial.println(angulo_roll);
}
// Iniciar sensor MPU6050
void MPU6050_iniciar() {
Wire.beginTransmission(MPU6050_adress);
Wire.write(0x6B); // PWR_MGMT_1 registro 6B hex
Wire.write(0x00); // 00000000 para activar
Wire.endTransmission();
Wire.beginTransmission(MPU6050_adress);
Wire.write(0x1B); // GYRO_CONFIG registro 1B hex
Wire.write(0x08); // 00001000: 500dps
Wire.endTransmission();
Wire.beginTransmission(MPU6050_adress);
Wire.write(0x1C); // ACCEL_CONFIG registro 1C hex
Wire.write(0x10); // 00010000: +/- 8g
Wire.endTransmission();
}
// Leer sensor MPU6050
void MPU6050_leer() {
// Los datos del giroscopio y el acelerómetro se encuentran de la dirección 3B a la 14
Wire.beginTransmission(MPU6050_adress); // Empezamos comunicación
Wire.write(0x3B); // Pedir el registro 0x3B (AcX)
Wire.endTransmission();
Wire.requestFrom(MPU6050_adress, 14); // Solicitar un total de 14 registros
while (Wire.available() < 14); // Esperamos hasta recibir los 14 bytes
ax = Wire.read() << 8 | Wire.read(); // 0x3B (ACCEL_XOUT_H) & 0x3C (ACCEL_XOUT_L)
ay = Wire.read() << 8 | Wire.read(); // 0x3D (ACCEL_YOUT_H) & 0x3E (ACCEL_YOUT_L)
az = Wire.read() << 8 | Wire.read(); // 0x3F (ACCEL_ZOUT_H) & 0x40 (ACCEL_ZOUT_L)
temperature = Wire.read() << 8 | Wire.read(); // 0x41 (TEMP_OUT_H) & 0x42 (TEMP_OUT_L)
gx = Wire.read() << 8 | Wire.read(); // 0x43 (GYRO_XOUT_H) & 0x44 (GYRO_XOUT_L)
gy = Wire.read() << 8 | Wire.read(); // 0x45 (GYRO_YOUT_H) & 0x46 (GYRO_YOUT_L)
gz = Wire.read() << 8 | Wire.read(); // 0x47 (GYRO_ZOUT_H) & 0x48 (GYRO_ZOUT_L)
}
// Cálculo de velocidad angular (º/s) y ángulo (º)
void MPU6050_procesar() {
// Restar valores de calibración del acelerómetro
ax -= acc_X_cal;
ay -= acc_Y_cal;
az -= acc_Z_cal;
az = az + 4096;
// Restar valores de calibración del giroscopio y calcular
// velocidad angular en º/s. Leer 65.5 en raw equivale a 1º/s
gyro_X = (gx - gyro_X_cal) / 65.5;
gyro_Y = (gy - gyro_Y_cal) / 65.5;
gyro_Z = (gz - gyro_Z_cal) / 65.5;
// Calcular ángulo de inclinación con datos del giroscopio
// 0.000000266 = tiempo_ejecucion / 1000 / 65.5 * PI / 180
angulo_pitch += gyro_X * tiempo_ejecucion / 1000;
angulo_roll += gyro_Y * tiempo_ejecucion / 1000;
angulo_pitch += angulo_roll * sin((gz - gyro_Z_cal) * tiempo_ejecucion * 0.000000266);
angulo_roll -= angulo_pitch * sin((gz - gyro_Z_cal) * tiempo_ejecucion * 0.000000266);
// Calcular vector de aceleración
// 57.2958 = Conversion de radianes a grados 180/PI
acc_total_vector = sqrt(pow(ay, 2) + pow(ax, 2) + pow(az, 2));
angulo_pitch_acc = asin((float)ay / acc_total_vector) * 57.2958;
angulo_roll_acc = asin((float)ax / acc_total_vector) * -57.2958;
// Filtro complementario
if (set_gyro_angles) {
angulo_pitch = angulo_pitch * 0.99 + angulo_pitch_acc * 0.01;
angulo_roll = angulo_roll * 0.99 + angulo_roll_acc * 0.01;
}
else {
angulo_pitch = angulo_pitch_acc;
angulo_roll = angulo_roll_acc;
set_gyro_angles = true;
}
}Orientación del sensor en el frame
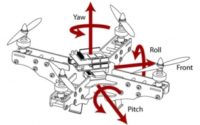
Como hemos visto en la entrada dedicada al montaje hardware, es necesario montar el sensor MPU6050 en nuestro drone con una orientación determinada. El sensor siempre tiene que estar orientado con uno de los ejes de movimiento, esto es imprescindible. Para ello, orientaremos la ‘fecha Y‘ del sensor con lo que consideremos la ‘parte delantera’ de nuestro drone, de esta forma, alinearemos este eje con nuestro eje Pitch (recordad que inclinarnos en el eje Pitch implica avanzar o retroceder). El eje Roll quedará automáticamente fijado en el eje perpendicular a este eje. Recordad que estamos construyendo un drone tipo ‘x’. Si no tenéis claro cual queréis que sea la parte delantera del drone, seleccionad una al azar y orientad la ‘flecha Y’ en esa dirección:


Ahora, cuando movamos hacia arriba el stick del eje Pitch, el drone se moverá hacia ‘delante’, es decir, hacia en la dirección que indica de ‘flecha Y’ y cuando lo movamos hacia abajo, el drone se moverá hacia ‘atrás’. Lo mismo pasará con el eje Roll, al mover su correspondiente stick a la derecha, nuestro drone rotará en esa dirección.
Continuar con la siguiente entrada:
- Conceptos generales sobre drones
- Material necesario y montaje de los componentes hardware
- Mando RC y receptor. Programación en Arduino
- MPU6050 y su programación en Arduino
- → Batería LiPo
- Control de estabilidad y PID
- Motores, ESC y su programación en Arduino
- Calibración de hélices y motores
- Software completo y esquema detallado
- Como leer variables de Arduino en Matlab
Conceptos generales sobre drones

Motores, ESC y su programación en Arduino

Hola a tod@s!
Gracias por el tutorial. Es excelente. Soy nuevo en arduino y estoy llevando a cabo un proyecto donde he de medir la posición de un objeto a lo largo de varias semanas y recabar todos los datos en una tarjeta SD. El problema es que con este código me arroja múltiples lecturas por segundo y yo necesitaría que las arrojase cada 5 segundos aprox.
¿Cómo podría conseguirlo?
Muchas gracias por su ayuda
Buenas! Utiliza la función delay()
Suerte con eso 😉
Tenía otra pregunta.. ¿Cómo puedo hacer para que los ángulos, al pasar de 90º en lugar de ir restando hasta cero, vaya sumando hasta alcanzar 180º? (sería la posición invertida)
Muchas gracias de nuevo
Eso ya nunca lo he hecho, tendrás que darle una pensada
hola;
este numero 0.000000266 de donde sale
Buenas Ariel,
La explicación viene como comentario –> 0.000000266: pi/1000/65.5/180
Hola, al probar Código para lectura de valores raw y me aparecen signos de interrogacion todo el tiempo y no cambia al mover el sensor
Buenas, se me ocurren dos razones por lo que re pueda pasar eso. Que el cableado no sea correcto, y que la dirección I2C no sea la correcta. Comprueba estos dos puntos, y seguro que ahí está la clave. Suerte!
hola, soy nuevo en esto y se me ha complicado con el envió de datos desde el control hacia el dron, estoy trabajando con el joystick arduino shield y el NRF24l01 , como deberia enviar el comando hacia el throttle. fundamentalmente no puedo pasar del calibrado de motores.
al no tener el squetch del control remoto ni del receptor en radio frecuencia, estoy bloqueado.
Gracias.
Buenas Eduardo,
La verdad que no estoy familiarizado con estos módulos… yo me he basado en un mando RC. ¿Recibes la señal de NRF24I01 de forma correcta? ¿has procesado la señal hasta obtener el mismo comportamiento que yo con el mando RC?
Suerte!
Buenas,
Antes que nada, gracias por compartir este material.
Estuve analizando el código y me surgen algunas dudas.
Hay algún motivo específico por el cual configurar los rangos del sensor como +/-8g y +/-500dps ? Habría algún inconveniente con utilizar los rangos de máxima precisión ? (+/-2g y +/-250dps)
Gracias / Saludos
JP
Buenas JP,
No hay ningún motivo especial… me fue bien con esos valores, pero se podrían usar otros.
Un saludo
Hola, tengo una duda…..en la imagen del MPU dice 5v en la entrada Vcc…pero en el diagrama completo creo que esta conectado a 3v3 del nano, es correcto? no me acuerdo mucho pero los «5v» en la placa del nano son salidas cierto? osea que el MPU se estaria alimentando con 3,3v ?
Las salidas de 5V de los ESCno se utilizan? para que es el divisor de corriente de A6 ? sacando cuentas tengo 4,68v…es la alimentacion???
Buenas Bruno,
El sensor puede funcionar tanto a 3.3V como a 5V, ya que la placa tiene un regulador interno.
Las salidas de 5V de los ESC no las utilizo no.
El divisor resistivo es para leer la tensión de batería.
Un saludo
La prueba de los motores funciona, pero cuando cargo IMUraw o IMUangle no hace nada, tampoco muestra nada en la pantalla
Tendrás que darme alguna pista más para que pueda ayudarte…
HOLA AMIGO MUY BUEN PROYECTO- GRACIAS POR TODA LA INFORMACION – ME ESTA SIRVIENDO DE MUCHO , ESTOY SIGUIENDO LOS PASOS , PERO EN EL PASO DE «Mando RC y receptor. Programación en Arduino (código» EL LINK NO MUESTRA LA INFORMACION , NO HAY NADA :/ , POR FAVOR PUEDE SOLUCIONAR ESE PROBLEMA.DE ANTEMANO POR LO DEMAS MUY BUENA INFO
Buenas Andy, yo puedo verlo sin problemas…. que enlace te falla exactamente?
Un saludo y gracias por avisar
Buenas tardes, me encanta tu post. Estoy al borde de terminar el drone, pero me surge una duda. Al mover el Giroscopo con el codigo final, sobre lo que seria el eje «roll» este para un lado toma valores positivos, y para el otro valores negativos. Hasta ahi todo bien, pero cuando muevo el giroscopo sobre el eje «pitch» tanto para un lado como para el otro los angulos que me bbrinda el giroscopo son siempre negativos, lo cual me resulta extraño. Esto es normal?? hice la prueba con 3 MPU6050 distintos y aun asi me dan lo mismo.
Buenas Giuliano!
Pues eso es muy raro jjejeje te pasa también con IMUraw?? o solo con el ánfulo. Prueba con el ejemplo IMUraw y a ver si pasa lo mismo…
Un saludo
Hola, gracias por tu respuesta. Me di cuenta que el error estaba en el codigo, en mi caso fallaba ya que utilizo un Arduino due, lo que me traia problemas es el wire.read()<<<8 y la concatenacion siguiente. Ya que el due es de 32 bits, puede leer el int completo. Al dejar el codigo tal cual lo habias hecho, terminaba leyendo tanto ax como ay y lo concatenaba como ax. Lo unico que no entienndo, y tal vez vos me puedas guiar, es el porque en el arduino Due las partes Integrales me escalan demasiado, siendo que le di a cada ki= 0,0007 y aun asi suben mucho, hasta los 380. Con el arduino Uno eso no me ocurre. Desde ya muchas gracias.
Buenos dias muy interezante la informacion estoy iniciando el ensamble del dron cuaiquier inquietud me puedo comunicar con usted gracias exelente dia
Entonces, si quiero calcular el vector total de la velocidad, basta con que sume los cuadrados de donde indicas la velocidad de cada eje y le saque raíz cuadrada, ¿Cierto?
Buena tarde, no puedo subir la programavion a la tarjeta arduino por wire.h y por wire.begintransmission.
que puedo hacer en este caso de ante mano muchas gracias.
Hola podrias explicar por aca en que consiste esta serie de intrucciones.
ax = Wire.read() << 8 | Wire.read(); // 0x3B (ACCEL_XOUT_H) & 0x3C (ACCEL_XOUT_L)
O sea que obtenemos con wire.read luego porque usar el operacional << con el 8 y luego ese | con nuevamente wire.read
Podrias detallar un poco mas esa parte, entendi todo el programa y todo bien pero esa instrucciones no logro comprenderlas muy bien
Hols, gracias por el post, no tengo ni idea de Arduino pero quiero montar este circuito con este sensor y programas lo siguiente:
1. Cuando de potencia a la placa, que el valor de GZ del MPU se ponga a 0.
2. Cuando el valor GZ supere 50 grados, activar un servo.
Quiero hacer un paracaidas para un cohete que se active con el ángulo de ataque y necesito que se resetee al conectarlo y que detecte el angulo y active un servo. Pero no se por donde empezar… :S
Espero que puedan darme luz, gracias.
Yo solo quisiera poder «anular» uno de estos CI giroscopios…….
Y usar solo un mando manual.
Hola , muy buen foro. Hice un proyecto de lectura de valores en arduino y noto disparos repentinos que vienen del MPU (falsos valores de fuerzas aplicadas de tipo instantaneo). Que se recomienda para eso respecto de los filtros. Mas bajo o mas alto?. Hoy lo tengo en 21 Hz. Muchas Gracias. Loenardo.