PCB DRONE | Manual de montaje
Esta estrada está destinada al montaje del PCB que hemos aprendido a diseñar en el curso de diseño de PCBs.

Lista de materiales
Tenéis la lista de materiales completa en la siguiente hoja de Excel:
Cada componentes tiene un identificador (Id) único. A lo largo de esta entrada y en cada apartado se irá especificando qué Id hay que utilizar para ir completando el montaje tanto del PCB como del drone. La hoja Excel incluye también enlaces de compra a Amazon y Aliexpress.
Manual de montaje del PCB
No todos los componentes del PCB vienen montados desde JLCPCB. Para reducir el coste del PCB, hay algunos componentes que tenemos que comprar y soldar nosotros mismo en casa. En los siguientes apartados veremos como montar estos componentes.
1- Conectores de señal
El PCB cuenta con varios conectores que tenemos que soldar nosotros mismos (Id. A4). Utilizaremos el mismo tipo de conector en todos los casos. Lo ideal es comprar una o varias tiras de este conector e ir cortándolo y soldándolo a la medida de cada caso:
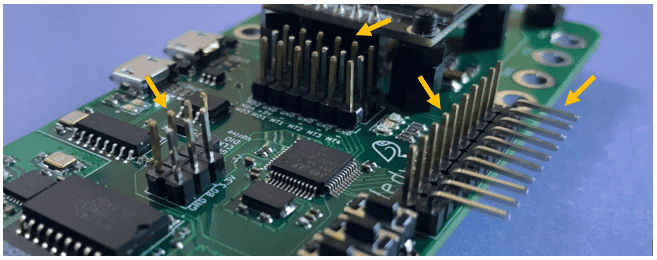

Comprar conector en Amazon Comprar conector en Aliexpress
En lugar del conector con inclinación de 90º se puede utilizar un conector recto como en el resto de los casos.
2- Antena SMA
Soldaremos la antena SMA (Id. A1) en su lugar correspondiente. No tiene polaridad, se puede colocar en cualquier orientación. Se puede añadir una antena para aumentar el rango de emisión.

Comprar antena SMA en Amazon Comprar antena SMA en Aliexpress
3- Conector XT60 hembra
Utilizaremos un conector XT60 hembra (Id. A2) en el PCB. Hay que garantizar un buen contacto entre el conector y el PCB, la soldadura tiene que ser uniforme, el estaño tiene que rodear todo el conector:

Comprar XT60 en Amazon Comprar XT60 en Aliexpress
4- Interruptor de 5V para la electrónica
La soldadura de este interruptor (Id. A6) no entraña dificultad, se puede colocar en cualquiera de las dos orientaciones:

Comprar interruptor en Amazon Comprar interruptor en Aliexpress
*Modelo SS-12D00G4
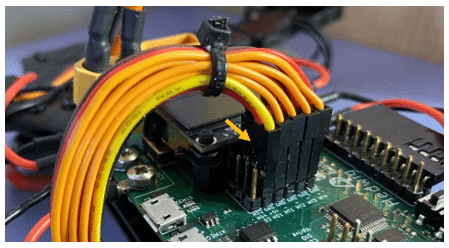
5- Conector para monitor OLED
No soldar el monitor OLED directamente al PCB. Utilizar un conector de 4 pines hembra (Id. A5) como el de la figura:

Comprar conector en Amazon Comprar conector en Aliexpress
6- Regulador de 5V y separadores de plástico
Soldar en regulador (Id. A3) en la parte inferior del PCB. El tornillo de plástico que utilizaremos para la sujeción del regulador será a su vez el que sujete uno de los separadores del monitor OLED:


Comprar regulador en Amazon Comprar regulador en Aliexpress
Una vez colocado el regulador y su respectivo separador (Id. A8), colocar el separador contiguo utilizando un tornillo de plástico (Id. A10) en la parte inferior:


Comprar kit separadores + tornillos + tuercas en Amazon
De momento, dejaremos los dos orificios restantes sin ningún separador. Esto se debe, como veremos más adelante, a que estos orificios se utilizarán tanto para fijar el monitor OLED al PCB, como para fijar del PCB con la estructura del drone:

Manual de montaje del drone
A lo largo de los siguientes apartadores veremos como integrar todos los componentes del drone.
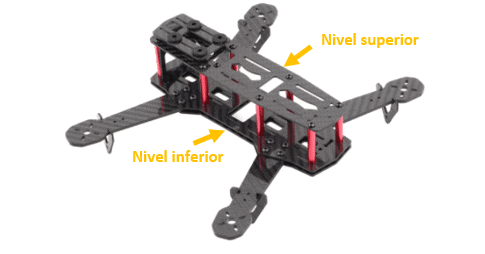
La estructura del drone que se va a utilizar tiene dos niveles. Para este proyecto, solo se ha utilizado el nivel inferior:
1- Fijación del PCB a la estructura
Hay 6 puntos de fijación del PCB con la estructura del drone (Id. A13). En primer lugar, colocar 6 separadores de plástico (Id. A8) en las posiciones indicadas en la figura inferior. Hay que utilizar tornillos de plástico (Id. A10) en la parte inferior de la estructura para la fijación de los separadores:

Comprar estructura en Aliexpress
Una vez hecho esto, encajar el PCB sobre los separadores de plástico fijándonos en colocar el extremo marcado con el número 1 donde corresponde:

Colocar tuercas de plástico (Id. A9) en los separadores de ambos extremos el PCB:


Los dos separadores centrales sobresaldrán por los orificios contiguos al conector para el monitor OLED:

Colocar dos nuevos separadores sobre estos últimos, que se utilizarán para fijar el monitor OLED al PCB:

8- Monitor OLED
Una vez colocados tanto el conector hembra de 4 posiciones como los cuatro separadores de plástico, podemos colocar el monitor OLED (Id. A7) en su posición definitiva:

Es posible que los separadores de plástico de 6mm no sean lo suficientemente altos como para llegar a la altura del conector hembra de 4 posiciones. En ese caso, se pueden utilizar las tuercas de plástico para ganar altura como en la siguiente figura:

9- Instalación de motores y ESC
En primer lugar, atornillas los cuatro motores (Id. A11) a la estructura del drone:

Comprar kit motores + ESC en Aliexpress
Colocar cada uno de los cuatro ESC (Id. A11) en cada brazo de la estructura, y sujetar con bridas:

La conexión trifásica entre el ESC y el motor se hará utilizando terminales tipo bala (Id. A18). Soldar cada fase del motor a un terminal macho, y cada cable del ESC a un terminal hembra. Importante utilizar los aislantes de plástico para evitar que las diferentes fases entren en contacto:

Comprar terminales bala en Amazon Comprar terminales bala en Aliexpress
Respecto a la entrada de tensión de batería de cada ESC, es necesario soldar un conector terminal de anillo (Id. A21) en cada uno de los cables rojo y negro:

Comprar terminales anillo en Aliexpress
*Modelo RV1.25-3
Utilizar cable termo retráctil o cinta aislante para aislar los terminales una vez hecha la soldadura:

Una vez instalados los conectores, atornillar los cables al PCB utilizando tornillo (Id. A20) y tuerca (Id. A19) de acero inoxidable. Conectar el cable rojo a 12V y el cable negro a GND. Atornillar cada ESC a la toma más cercana:

El cable de señal de cada ESC puede ser conectado directamente al PCB si tener que manipularlo, siempre fijándonos en conectarlo de forma adecuada:

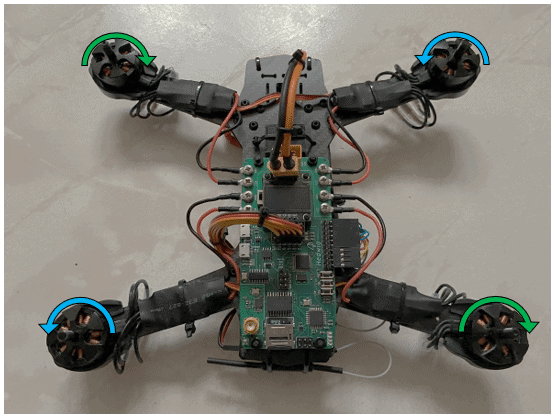
A la hora de conectar los cuatro cables de señal de los cuatro ESC, es importante conectar los motores según esta numeración. Con esto garantizamos que el software proporcionado funcionará correctamente. Con esta numeración, la parte ‘delantera’ de nuestro drone será la marcada con la flecha naranja:

- Conectar el cable de señal del motor 1 de la figura al conector MT1 del PCB
- Conectar el cable de señal del motor 2 de la figura al conector MT2 del PCB
- Conectar el cable de señal del motor 3 de la figura al conector MT3 del PCB
- Conectar el cable de señal del motor 4 de la figura al conector MT4 del PCB
10- Instalación de receptor radio control
La ubicación más lógica para el receptor (Id. A12) es en la parte baja de la estructura, justo debajo del conector para la tarjeta microSD. Sujetar bien el receptor a la estructura utilizando bridas:


Comprar mando + receptor en Amazon Comprar mando + receptor en Aliexpress
*Mando FLYSKY-FS-i6 + receptor iA6B
El fabricante recomienda colocar las dos antenas con una inclinación de 90º. Para ello, colocar la primera antena sobre el propio receptor aprovechando las bridas de sujeción como se muestra la figura superior, y colocar la segunda antena en el extremo contiguo de la estructura, como muestra la imagen inferior:

De esta forma, ambas antenas forman un ángulo de 90º:

Para simplificar el cableado, utilizar el canal número 1 de receptor (CH1), ya que está preparado para transmitir en modo PPM, donde el receptor concatena en una sola señal la información de los 6 canales del mando radio control. De esta forma, solo necesitamos un conector de 3 posiciones como el de la figura: 5V, GND y la señal.

Conectaremos el otro extremo de este conector al PCB, también al canal número 1 (MD1).
14- Instalación de la batería
Colocar la batería (Id. A14) en la parte inferior del drone. Al ser el elemento más pesado de todos, conviene centrar la batería lo máximo posible en la estructura:

Comprar batería en Amazon Comprar batería en Aliexpress
*Batería Lipo 3S 11.1V 1800mAh 50C XT60
Si los cables de la batería son demasiado cortos como para llegar al conector XT60 del PCB, habrá que alargarlos. Utilizar cable de la misma sección que el de la batería y aislad bien los cables, hay que evitar a toda costa hacer un cortocircuito en la batería:

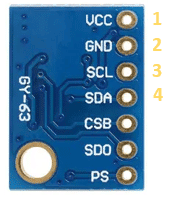
12- Barómetro MS5611 + carcasa
Cablear el sensor MS5611 utilizando cables finos para que quepan por la abertura de la carcasa. Utilizar un conector hembra de 4 posiciones en el extremo opuesto del sensor (Id. A5). Colocar el barómetro MS5611 dentro de la carcasa, y fijarla a la estructura con una brida:

Comprar MS5611 en Amazon Comprar MS5611 en Aliexpress
Finalmente, conectar el sensor al PCB. El orden de los pines no es el mismo en el sensor y en el PCB:

13- LiDAR
Colocar el LiDAR (Id. A15) en el extremo inferior del PCB opuesto al receptor radio control y fijarlo utilizando dos bridas a los dos orificios contiguos a este:

El conector de este no es compatible con nuestro PCB (es una mejora interesante que podéis añadir al PCB vosotros mismos). Por ello, hay que cortar los cables y utilizar un conector hembra de 6 posiciones (Id. A5).
La numeración de nuestro conector es idéntica a la del módulo LiDAR. De todas formas, asegurad que conectáis el conector de forma correcta:

Hay que conector los pines 1-6 del módulo LiDAR con estos pines del PCB:

Los siguientes dos apartados tienen que realizarse una vez completado el montaje de los apartados superiores. Es necesario haber validado la comunicación con el mando RC.
14- Sentido de giro de los motores
De los cuatro motores que tenemos, dos de ellos tienen que girar en un sentido, y los otros dos en el otro sentido. Los motores en diagonal tienen que girar siempre en el mismo sentido:
Para cambiar el sentido de giro de un motor, basta con intercambiar dos de sus fases. Gracias a los terminales bala que hemos utilizado, será muy sencillo hacer el intercambio de las fases:

Comenzar conectando las fases de los motores y ESC de forma aleatoria. Poner los motores a girar (sin hélices) y ver en qué sentido lo hacen. Después, ir intercambiado las fases de aquellos motores que giren en sentido contrario al deseado, hasta que todos giren en el sentido especificado en la figura superior.
Tenéis el software para girar los motores en mi GitHub.

15- Colocación de las hélices
| ⊗ La colocación de las hélices tiene que hacerse en último lugar, tras haber montado el drone, y haber comprobado que el software actúa como debería. Nunca colocar las hélices sin haber validado antes el software ⊗ |
Os habréis fijado en que las palas de las hélices tienen inclinación:

La parte alta de la pala siempre tiene que apuntar en sentido del movimiento. Esta es la razón de tener dos tipos de hélice diferentes. Colocar las cuatro hélices siguiendo esta lógica y teniendo en cuenta el sentido de giro de cada motor como se especifica en el apartado anterior:



Programar STM32 con IDE de Arduino y ST-Link

PCB DRONE | Pruebas software básicas

Hola amigo como estas soy Richard de Colombia y estoy interesado en el curso pero no e podido hacer el pago dice que el banco rechazo la compra y no e podido y la verdad tengo muchas ganas de ver el resto del curso por favor si me puedes ayudar
Buenas Ricardo, qué problema tienes exactamente? supongo que será algún problema de Udemy, lo mejor será que contactes con ellos.