Boya Iridium con Arduino y GPS | Introducción proyecto Elcano

¡Hola a todos!
Os vengo a presentar el nuevo proyecto basado en Arduino que tengo pensado llevar a cabo, y ya de paso, buscar algo de financiación. He bautizado este proyecto como ‘proyecto Elcano‘, en honor al primer marino en dar la vuelta al mundo, Juan Sebastian Elcano, que por cierto, fue guipuzcoano como yo 🙂
Indice ‘Boya Iridium con Arduino | Proyecto Elcano‘:
- ⇒ Introducción
- Análisis preliminar de concepto y costes
- Diseño electrónica (esquemas y PCB)
- Montaje hardware (próximamente)
- Programación en Arduino (próximamente)
- Lanzamiento y seguimiento (próximamente)
La idea a grandes rasgos es crear una boya marina y dejar que la arrastre la corriente por el océano atlántico, registrando su posición día tras día y ver donde acaba. Utilizaría un módulo GPS para registrar su posición (coordenadas) una o dos veces al día, y un módulo Iridium embarcado para comunicarme vía satélite con la boya y transmitir los datos hasta mi blog. Recordad que en mitad del océano no existe posibilidad de comunicación alguna, a excepción de comunicación vía satélite. En este campo, los módulos Iridium, a excepción de otros fabricantes, garantizan una cobertura mundial 24/7, incluso en los polos de la tierra, gracias a su red de satélites propia.

En punto de partida estaría situado en la costa oeste de España, quizás en Galicia.
Además de registrar la posición, me gustaría incluir algún sensor para medir las condiciones del mar allá por donde navegue la boya, por ejemplo, un MPU6050 para medir el oleaje, o la temperatura. Los datos que vaya enviando la boya con sus coordenadas y la lectura de los sensores serán actualizadas de forma automática con mi blog.
Para garantizar la máxima autonomía, incluiré una batería de 3.7V y 2400mAh, además de una placa solar de 1W que irá cargando esta batería cuando sea posible. Para ello, utilizaré una caja estanca y que sea de tapa transparente para permitir a los rayos de sol incidir sobre la placa solar. Habrá que garantizar también que el consumo de energía sea mínimo, manteniendo el sistema en modo ‘bajo consumo’ la mayor parte del día, conectando los sensores una o dos veces al día para hacer las lecturas y transmitir la información. Será necesario hacer un análisis exhaustivo de consumos.
Aquí os dejo el esquema electrónico preliminar de la futura boya, a falta de hacer un análisis mas exhaustivo y ver diferentes opciones:
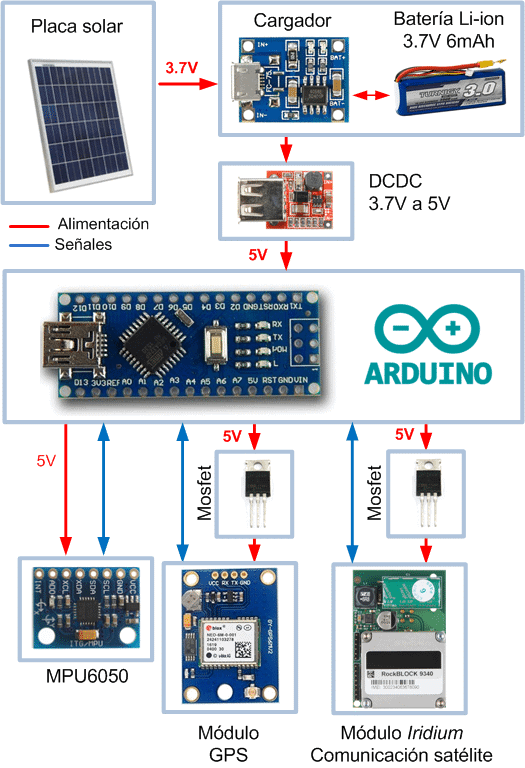
El montaje de los componentes y la estanqueidad de la caja utilizada (IP65 o más) serán claves en este proyecto. Habrá que garantizar también que la boya no vuelque, dejando la placa solar boca abajo.
Una vez finalizado el proyecto, la idea es hacer un tutorial paso a paso de como crear una boya de este tipo, como hice con el proyecto del drone desde cero, para que todo aquel que quiera llevar a cabo un proyecto como este pueda hacerlo de forma sencilla.
He estimado un coste de 350€ para este proyecto, donde el 65% de este dinero irá dedicado a la adquisición del módulo Iridium, que tiene un coste de 230€ (250$). Además del módulo, será necesario pagar una mensualidad de unos 10€ para poder utilizarlo. Para poder financiar el proyecto, he creado esta página de crowdfunding, donde todo aquel que lo desee podrá colaborar con la aportación que le parezca.
![]()
Si no queréis colaborar económicamente, podéis hacerlo aportando ideas. Si tenéis cualquier sugerencia con este proyecto, no dudéis en transmitírmelas en los comentarios ¡¡Gracias a todos por el apoyo!!
- Fecha estimada para finalización del proyecto (dejarlo en el mar): verano 2020
- Lugar estimado de lanzamiento: costa Gallega
Ir a la siguiente entrada del proyecto Elcano:
- Introducción
- →Análisis preliminar de concepto y costes
- Diseño electrónica (esquemas y PCB)
- Montaje hardware (próximamente)
- Programación en Arduino (próximamente)
- Lanzamiento y seguimiento (próximamente)
** Antes de comenzar con este proyecto, estoy desarrollando una estación meteorología WIFI autónoma, alimentada por una batería y placa solar. Gran parte del material que utilizo, placa solar, cargador, IGBTs para conexión/desconexión de sensores de alto consumo… serán los mismo que para el proyecto de la boya, por lo que me servirá para adquirir conocimientos en este sentido y aplicarlos después a este proyecto.

¿Para evitar que vuelque como lo harás?
Ya que no puedes controlar la “ferocidad” del océano, ¿lo montaras de forma que por mucho que se ponga boca abajo se gire?
Si no encuentras la manera, ¿no será más fácil colocar dos placas (una por cada lado) por si el objeto en si vuelca? Igual que dos antenas…
Buenas Jose,
La idea es hacer que no vuelque, o que si vuelca vuelva a su estado ‘boca arriba’ solo. En internet ya he visto diseño simples de como hacerlo. Aun tengo que darle una vuelta. Antes de ponerme con este proyecto estos con otro.
La principal razón de no poner dos panales solares y dos módulos Iridium es el dinero, cada modulo vale 250€…. y es mucho jejejeje
Un saludo!
Amigo es un gran proyecto y lo de la boya se soluciona teniendo el centro de gravedad bajo y poniendo la bateria lo mas lejos posible de la flotacion en cuanto a que la dejes en las costas gallegas no es factible porque las corrientes te la devolveran a tierra lo normal seria contactar con un barco de pesca que se alejase y la dejase en el medio del atlantico o proximo a las costas americanas un saludo
Buenas Capitan!
Como sabes que en Galicia las corrientes arrastraría la boya contra la costa en vez de llevarla mar adentro??dependerá del viento, de la marea…. de donde has sacado esta información?? me vendría muy bien saberlo.
Lo de dejarlo a algún pesquero me parece una idea genial, no se me había ocurrido. En mi zona hay mucho pesquero que faena por las costas de medio mundo.
Un saludo
Amigo tengo una carcasa de una epirt =boya de localizacion de accidentes tiene la antena de 405 Mz la parte superior es una semiesfera transparente el tamaño total es de aproximadamente de 20 cm si te vale te la cedo gratuitamente saludos
Te he mandado un email 😉
.
Wow!
Quise hacer un proyecto similar con arduino hace años, pero me topé con los precios altos de según que cosas, como bien dices.
Ahora estoy intentando retomar el proyecto con una placa ESP32.
Para la carcasa, tengo una bola de plastico de ChupaChups grande que me sirve muy bien.
Para el sistema de generación de electricidad, estoy teniendo en cuenta juntar las tres opciones: solar, eólica, y hidráulica, puede que también la de marea con un mini remo o pala.
Buenas!! Si quieres desplazarte con alguna pala si que necesitarás incorporar sistemas de generación de energía potentes… lo que no veo tan claro es la hidráulica?? como piensas hacerlo? la eólica también tiene sus pegas… piensa que el océano es un ambiente muy hostil y que un generador de este tipo es muy frágil.
Ya nos contarás. Muchas suerte!
Buenas, que tal?, yo tengo un modem iridium satellite LLC, http://www.antrax.de/downloads/iridium-shield/antrax-manual/arduino-iridium-shield-manual_en.pdf te lo puedo ofrecer por 120€
Tu y yo tenemos que conocernos, mándame un mail
y como te fue al final lo conseguiste o todavía necesitas alguna cosa
Cristianvn13@gmail.com este es mi imail si todavía estas en esto o en otro proyecto pues mandame un imail con lo que necesitas
Buenas!
Pues de momento está parado el proyecto… demasiado caro. Tienes experiencia en sistemas de este tipo?
Un saludo
Master.
Buena la idea de tu proyecto, yo estoy realizando algo parecido pero en mi caso la boya será mas bien un trimarán dotada de motores para medir variables del entorno en puntos específicos.
He trabajado con boyas autónomas pero nunca con los módulos iridium. Pienso implementar iridium en el proyecto del trimarán.
Si gustas nos comunicamos para ver si te puedo ayudar en algo.
Saludos.
Buenas Felix,
Que bueno, ese mismo proyecto anda rondándome por la cabeza desde hace tiempo. Pero primero que terminar la boya.
Una pregunta. Que módulo GPS vas a utilizar? yo estoy haciendo pruebas con el NEO 6-M, pero me tarda entre 10min y 30min y coger la posición.
Un saludo
Estoy utilizando un módulo que está descontinuado. Específicamente este: https://hobbyking.com/es_es/nano-px-gps-with-compass-for-pixhawk-px4.html
Ahora pienso usar NEO 6-M, aunque con lo que me dices analizaré si utilizar algún otro módulo que adquiera la posición en menos tiempos.
Si gustas me mandas un correo para mantener un contacto mas directo.
Saludos!
Buenas de Nuevo,
Según datasheet el GPS debería tardar no más de 34s en encontrar posición. Probablemente cuando hice las pruebas no tenia buena visión del cielo, y se ahí el retardo.
Correo enviado 😉
Un saludo
Saludos, como te termino de ir con este proyecto tan interesante.
Buenas Javier. El proyecto está en parado por el momento. De hecho, voy a comenzarlo desde cero diseñando el PCB de nuevo e incluyendo varias funcionalidades nuevas.
Hola,
mira esta dirección:
https://www.xataka.com/makers/este-barco-de-playmobil-esta-surcando-los-mares-del-mundo-y-puedes-seguirle-la-pista